3I/ATLAS: Between Science and Mystery
3I/ATLAS: Between Science and Mystery Continue reading

Artificial Intelligence on Aircrafts
Exploring the Role of Artificial Intelligence in Modern Aircraft SystemsArtificial Intelligence (AI) has been making waves in various sectors, and the aviation industry is no … Continue reading

Solutions to make aviation industry turbulence-free
Solutions to make aviation industry turbulence-free Continue reading
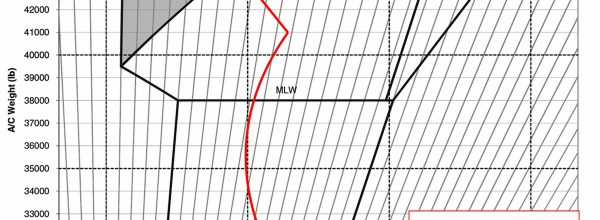
How to calculate Weight and Balance -Calculation tool
How to calculate Weight and Balance -Calculation tool Continue reading

AI in the Aerospace Industry
AI in the Aerospace Industry Continue reading

Indian rover begins exploring Moon’s south pole – How it works
Indian rover begins exploring Moon’s south pole Continue reading

An Overview of Drones and their Applications
An Overview of Drones and their Applications Continue reading

The companies racing to make a hypersonic aircraft
The companies racing to make a hypersonic aircraft Continue reading

AI co-pilots are ready to be used on general aviation aircraft
AI co-pilots are ready to be used on general aviation aircraft Continue reading
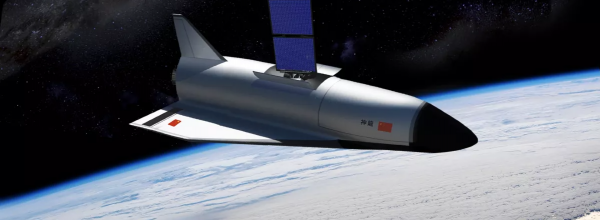
China’s mysterious space plane returns to Earth after 9-month
China’s mysterious space plane returns to Earth after 9-month Continue reading

Musk’s Neuralink is now approved for human trials
Musk’s Neuralink is now approved for human trials Continue reading

New kind of solar cells generate electricity even at night
New kind of solar cells generate electricity even at night Continue reading

Startup Made a Functioning ‘Invisibility Shield’. Here’s How It Works
Startup Made a Functioning ‘Invisibility Shield’. Here’s How It Works Continue reading

Researchers make a quantum storage breakthrough by storing a qubit for 20 milliseconds
Researchers make a quantum storage breakthrough by storing a qubit for 20 milliseconds Continue reading

Wind hydrogen, Siemens Gamesa and Strohm collaborate to create a hydrogen transport system produced directly by marine wind turbines
Wind hydrogen, Siemens Gamesa and Strohm collaborate to create a hydrogen transport system produced directly by marine wind turbines Continue reading

Namibia wants to become a green hydrogen superpower
Namibia wants to become a green hydrogen superpower Continue reading

Bill Gates chose where to build his first nuclear plant
Bill Gates chose where to build his first nuclear plant Continue reading
Developed fluorescing composite material that inspects itself
Developed fluorescing composite material that inspects itself Continue reading
The Ultimate Theory of Everything
The Ultimate Theory of Everything Continue reading

New Speed Limit For Moving Quantum Information
New Speed Limit For Moving Quantum Information Continue reading

















3D Model
Buran - Russian Space Shuttle ...
 Buran - Russian Space Shuttle - 3D Model Read More...
Buran - Russian Space Shuttle - 3D Model Read More...
Library
Buran - Russian Space Shuttle ...
Buran - Russian Space Shuttle - 3D Model Read More...
Technology & Science
Musk's Neuralink is now approv...
 Musk's Neuralink is now approved for human trials Read More...
Musk's Neuralink is now approved for human trials Read More...
Static Analysis
Lateral Instability of Beam �...
 Lateral Instability of Beam – Calculation of critical stress value Read More...
Lateral Instability of Beam – Calculation of critical stress value Read More...
Stress Analysis
Inter-Rivet Buckling
 Inter-Rivet Buckling Read More...
Inter-Rivet Buckling Read More...
Aircraft Design
How to calculate Weight and Ba...
 How to calculate Weight and Balance -Calculation tool Read More...
How to calculate Weight and Balance -Calculation tool Read More...
podcast
Air Force One: Flying Fortress...
 Air Force One: Flying Fortress - Podcast Read More...
Air Force One: Flying Fortress - Podcast Read More...
Documentaries
Coronavirus Special - Docume...
 Coronavirus Special - Documentary 2020 Read More...
Coronavirus Special - Documentary 2020 Read More...
FEM - Analysis
How to create Contacts with a ...
 For contact simulation between two structural components with MSC Nastran is necessary to perform a static analysis (Linear Simulation by SOL101 Read More...
For contact simulation between two structural components with MSC Nastran is necessary to perform a static analysis (Linear Simulation by SOL101 Read More...
Space Flight
The Soyuz Launch Sequence Expl...
 The Soyuz Launch Sequence Explained Read More...
The Soyuz Launch Sequence Explained Read More...